CNN (Convolutional Neural Network)
CNN은 최소한의 전처리(preprocess)를 사용하도록 설계된 다계층 퍼셉트론의 한 종류이다. CNN은 하나 또는 여러개의 합성곱 계층과 그 위에 올려진 일반적인 인공 신경망 계층들로 이루어져 있으며, 가중치와 통합 계층(pooling layer)들을 추가로 활용한다.DNN에서는 Dense Layer를 사용한다. → Dense Layer는 Wx+b이라서 Linear와 Rogistic 회귀가 합쳐진 느낌
CNN에서는 Convolution이라는 연산을 활용함
퍼셉트론 관련 포스팅 [AI] 딥러닝의 개요 - 퍼셉트론 [AI] DNN(Deep Neural Network)의 이해 및 실습
합성곱 (Convolution)
원래는 필터가 정해져 있고 필터를 거쳐서 나오는 것을 특징으로 활용해서 기존에 머신러닝에서 feature 추출하는 방향으로 사용을 했었는데 딥러닝에서 넘어오면서 Convolution에서 필터 자체도 학습하도록 메커니즘이 생김
필터와 실제 이미지를 겹쳐서 각자 곱한 다음에 9개를 다 더해서 값이 나옴 W1*1 + W2*1 + W3*1 + W4*0 + W5*1 + W6*1 + W7*0 + W8*0 + W9*1
기존에는 필터를 미리 정의를 해놓고 곱해서 특징을 뽑았었는데, 딥러닝에서는 필터도 학습을 함
원래 필터는 0과 1만 있는 게 아니라 여러 숫자가 나올 수 있고, 소수로 되어있음
합성곱 padding
Convolution을 하면 사이즈가 작아지는 현상이 발생할 수 있다.
이미지 크기를 조절하기 위해 사용한다.
이미지 외곽에 어떤 것이 있는지 인식하는 학습 효과도 있음
padding은 기본적으로 0으로 만든다.
Pooling
Convolution layer의 출력을 입력으로 받아서 크기를 줄이거나 특정 데이터 강조
이미지의 크기가 너무 크다보니 데이터를 그대로 사용하기엔 파라미터가 너무 커지고 연산도 오래걸려서 Pooling 사용으로 크기를 줄여줌
학습하는 파라미터가 존재하지 않음! Convolution Layer는 학습 파라미터 존재
Max Pooling
윈도우에서 제일 큰 값을 가지고 오는 Pooling
Average Pooling
윈도우에서 평균 값을 가지고 오는 Pooling
→ 몇 칸 움질일지 정할 수 있고, 윈도우 사이즈(2*2)도 정할 수 있음
→ 조금씩 움직이면 더 세밀하게 되는데 차원이 커지고 연산이 많아져서 성능에는 유리할 수 있지만 속도가 느려짐
Pooling을 사용하면 속도가 빨라지는데 학습 속도도 빨라지고 서비스할 때 추론 속도도 빨라지게 되는데 Pooling을 많이 사용하게 되면 데이터를 없애는 것이기 때문에 데이터 손실이 일어날 수 있어서 성능에 오히려 악영향을 줄 수 있음
손글씨 데이터를 가지고 만든 CNN 구성
kernel = filter (55 필터 적용) → 학습해야하는 파라미터 수 : 55 = 25개 + b값 = 50개 * 채널갯수
channels : 필터가 여러개 → padding을 안하면 크기가 줄어든다.
Convolution Layer → Pooling Layer → Convolution Layer → Pooling Layer → Flattened → (dropout) → softmax Layer
Flattened → Dense를 하기 위해서 Flatten을 해줘야함, 1열로 세워져야 Dense가 입력으로 들어갈수 있어서 Flatten을 해줌
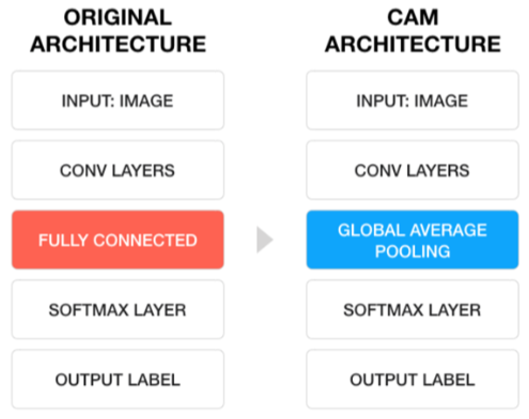
Convolution, Pooling Layer ⇒ Feature Extaction (특징 추출)
Fully-Connected ⇒ Classification (분류)
Convolution Layer가 의미하는게 무엇인가?? 특징을 추출하는 부분
CNN 실습
import tensorflow as tf
# data download
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.mnist.load_data()
이미지의 경우, 위의 코드처럼 쓰면 2차원으로 받아오는데 실제로는 3차원이 Convolution Layer에 들어가야해서 데이터를 바꿔줘야함
28*28에 대한 60000개의 데이터가 x_train에 들어있어서 원래는 3차원이 들어가있는데 4차원으로 바꿔줘야함
Convolution을 할 때는 지금은 흑백이라서 채널이 한개짜린데 원래 이미지는 RGB 채널을 가지기때문에 채널이 기본적으로 3개가 있음! 그렇기 때문에 이미지의 input은 3차원이 들어가야하므로 reshape를 해줘야 학습이 됨
reshape : 모양을 변경하는 함수 → 기존과 바뀐 것의 데이터 총 사이즈는 같아야함
x_train = x_train.reshape((60000, 28, 28, 1)) # 60000만개의 학습 데이터
x_test = x_test.reshape((10000, 28, 28, 1))
원래 이미지는 RGB로 되있기 때문에 3차원인데 손글씨는 2차원이기때문에 3차원으로 변경을 해준것이다!!그런데 Conv2D를 쓰는 이유는?
모델 정의
Conv2D : convolution 2D 이미지를 사용
MaxPooling2D : 2*2 윈도우 사이즈
채널갯수, hidden Layer 갯수는 임의로 넣은 값임
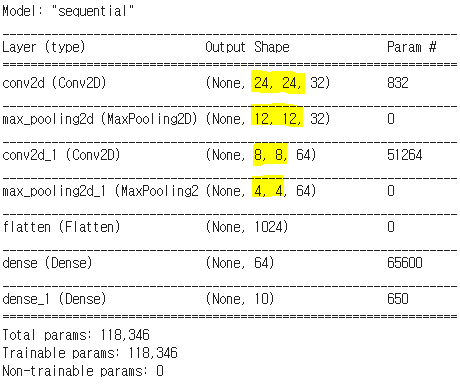
#model define
model = tf.keras.models.Sequential()
model.add(tf.keras.layers.Conv2D(32, (5, 5), activation='relu', input_shape=(28,28,1)))
model.add(tf.keras.layers.MaxPooling2D((2, 2)))
model.add(tf.keras.layers.Conv2D(64, (5, 5), activation='relu'))
model.add(tf.keras.layers.MaxPooling2D((2, 2)))
model.add(tf.keras.layers.Flatten())
model.add(tf.keras.layers.Dense(64, activation='relu'))
model.add(tf.keras.layers.Dense(10, activation='softmax'))model.summary()
model.compile(optimizer='adam', loss='sparse_categorical_crossentropy', metrics=['accuracy'])
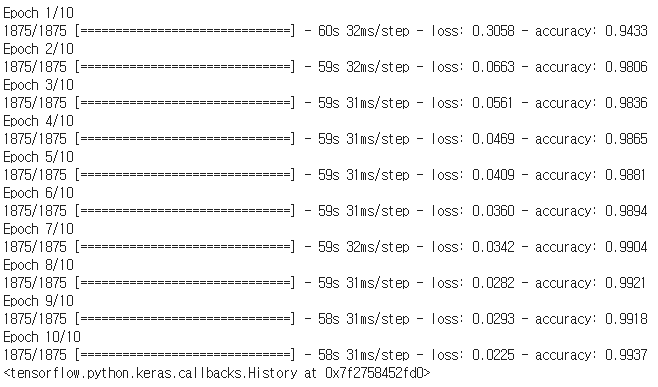
model.fit(x_train, y_train, epochs=10)
model.evaluate(x_test, y_test, verbose=2)